繼上一階段我們學(xué)習(xí)了《工業(yè)機器人編程》之后,本階段我們來介紹《工業(yè)機器人操作基礎(chǔ)》,,因為現(xiàn)在工業(yè)機器人廠家眾多,不能都一一介紹,,本次主要以國產(chǎn)新松機器人(六
Read More..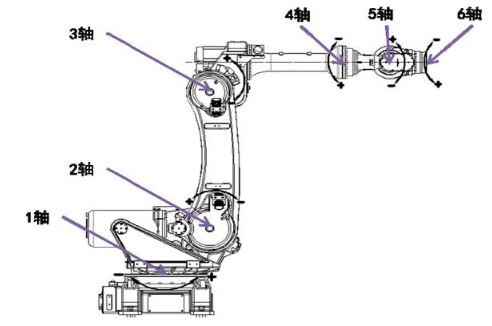
本次主要以國產(chǎn)新松機器人(六軸)作為分析和介紹對象來進行說明,,第一章我先介紹《工業(yè)機器人軸和坐標系概述》:一、工業(yè)機器人軸的定義1,、工業(yè)機器人軸可以為旋轉(zhuǎn)軸
Read More..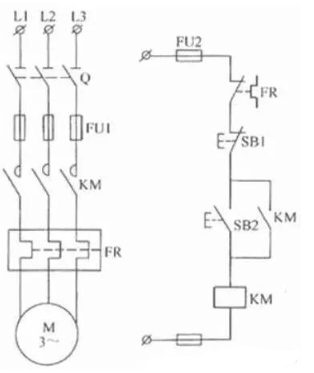
自鎖與互鎖作為電動機最基礎(chǔ)的二次線保護方式,,是每個電工都必須學(xué)會并且熟練運用的。本篇內(nèi)容適合初學(xué)者或者對電工感興趣的人,。一般來說,,學(xué)習(xí)電動機正反轉(zhuǎn)可以更
Read More..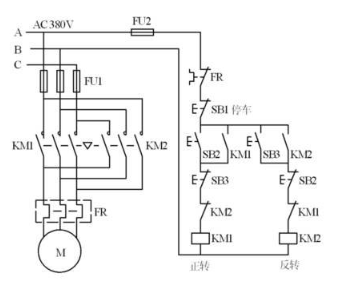
在圖1是三相異步電動機正反轉(zhuǎn)控制的電路和繼電器控制電路圖,,圖2與3是功能與它相同的PLC控制系統(tǒng)的外部接線圖和梯形圖,其中,,KM1和KM2分別是控制正轉(zhuǎn)運行和反轉(zhuǎn)運行
Read More..
干涉區(qū)描述:同一工位的機器人,,在工作過程中,,需要進入到同一個區(qū)域,,但在進入的先后次序無嚴格的限定,,即:任意一臺機器人先進入,,在工藝上都允許(除了影響運行時間外
Read More..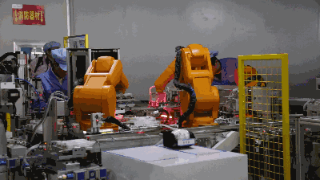
PLC可編程邏輯控制器,,它采用一類可編程的存儲器,,用于其內(nèi)部存儲程序,,執(zhí)行邏輯運算、順序控制,、定時,、計數(shù)與算術(shù)操作等面向用戶的指令,并通過數(shù)字或模擬式輸入/輸
Read More..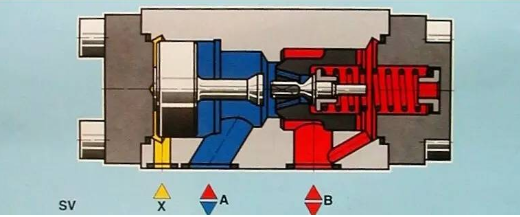
方向控制閥簡稱方向閥,主要用來通斷油路或切換油流的方向,,以滿足對執(zhí)行元件的啟,、停和運動方向的要求。按其用途可分為兩大類:單向閥和換向閥,。 (1)單向閥 單向閥
Read More..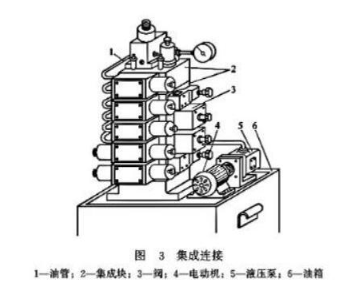
液壓系統(tǒng)中常常會看到各種各樣的液壓閥,,那么液壓閥的連接方式有哪些呢,??碩辰液壓廠家告訴你液壓閥的連接方式有管式連接、板式連接,、集成塊式及疊加閥式等,,下面就
Read More..
在非標自動化設(shè)備中常用的驅(qū)動方式有兩種:氣缸驅(qū)動和電機驅(qū)動。運動機構(gòu)要是每次行走固定距離時,,我們會選用氣功驅(qū)動,;運動機構(gòu)每次行走的距離不固定或者多次行走或
Read More..
任何機械包括非標自動化設(shè)備的基本調(diào)試技巧都是橫平、豎直,、同心.首先不管調(diào)試任何一個產(chǎn)品,我們都要了解它的特性,和客?戶的技術(shù)要求,。下面我為大家介紹一些常見
Read More..